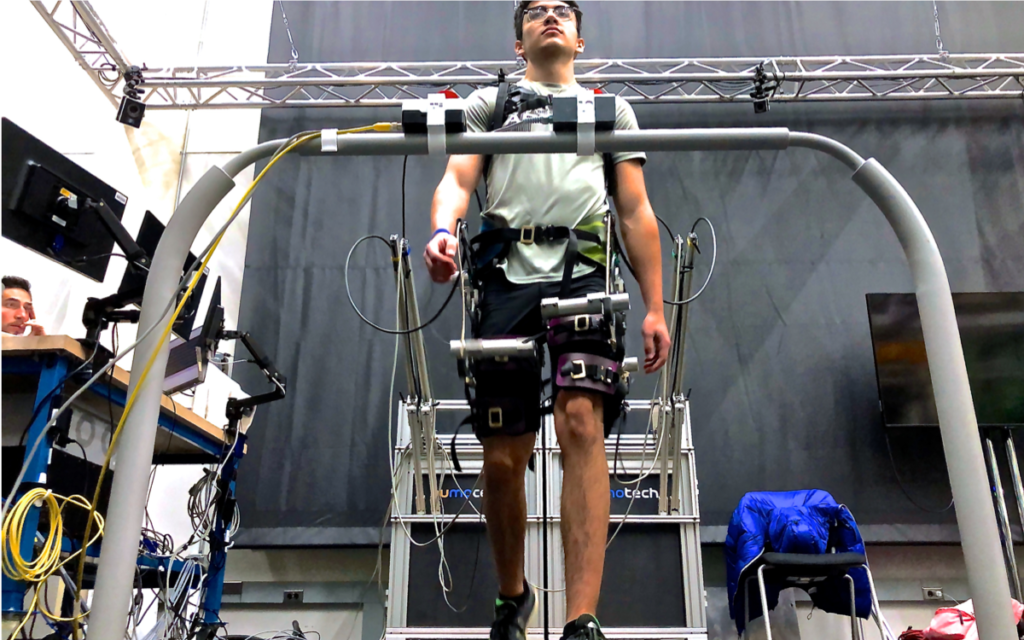
To realize the potential of exoskeletons, it is necessary to understand the two-way relationship between assistive robotics and the human biomechanical/metabolic system. Using an exoskeleton emulator (implemented with a hip exoskeleton end-effector a.k.a HipEE) actuated by powerful off-board motors, we are able to mimic passive devices (spring-based) and rapidly optimize variety of controllers (including proportional myoelectric, impedance, neuromuscular model based, hybrids, etc.) for their effects on muscles, tendons, and the energetic cost of walking. We understand these effects by collecting and analyzing motion capture data (kinematics and kinetics of motion), EMG signals (muscular activation), ultrasound images (muscular shape change/stiffness), and respiratory data (energetic cost). We will apply this collected information to optimize controllers to drive specific changes to the musculoskeletal system as well as assist/enhance locomotion in specific populations (elderly, stroke patients, military, etc.).
Lab members:
Ben Shafer
Justine Powell
Collaborators:
Dr. Greg Sawicki
Pawel Golyski
Stefan Klein
Related work:
Ben Shafer, Sasha Philius, Richard Nuckols, James McCall, Aaron Young, Greg Sawicki, “Neuromechanics and energetics of walking with an ankle exoskeleton using neuromuscular-model based control: a parameter study,” Frontiers in Bioengineering and Biotechnology, accepted, March 2021.