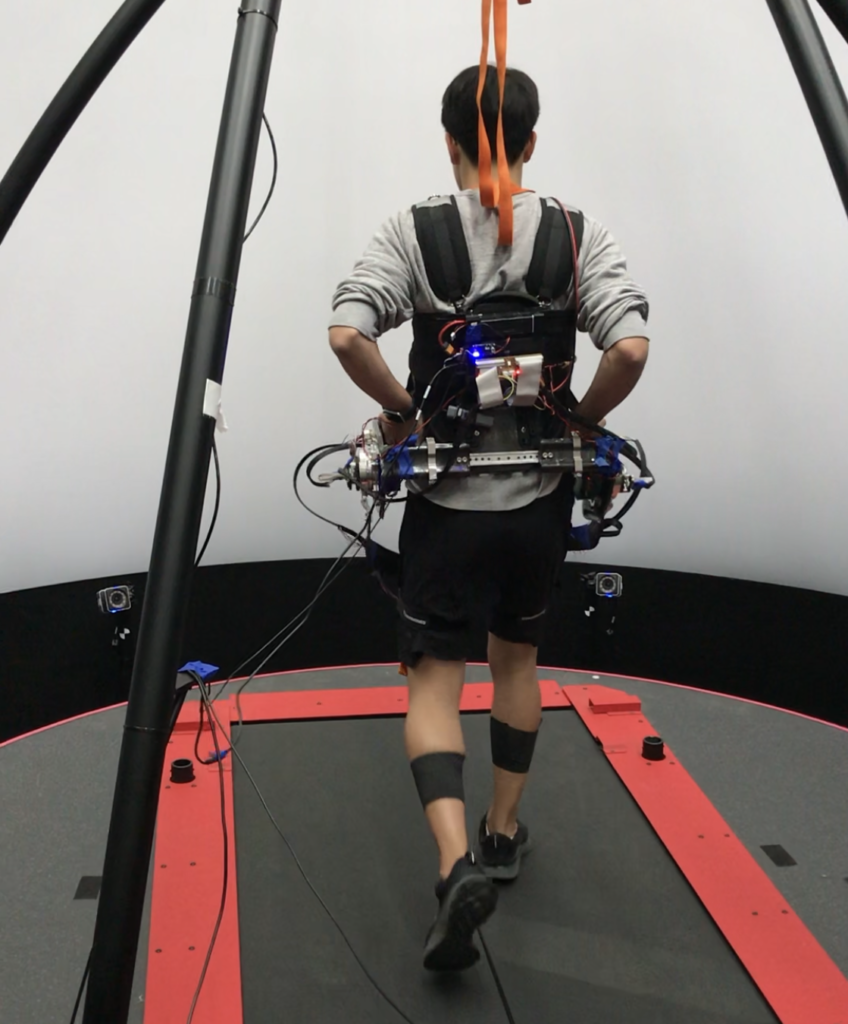
To build wearable devices that accommodate users throughout non-uniform terrain in the world outside of the lab, we must first understand the biomechanics of non-steady state locomotion. Using our lab’s CAREN system, we are able to rapidly move the locomotion platform in 6 degrees-of-freedom, allowing for the application of sudden perturbations or continuous unstable environments. We are investigating biomechanical and neural control responses during unstable tasks through the collection of motion capture, ground reaction forces, and electromyography (EMG) data. The results from these experiments will be used to inform the design and control methods for a wearable hip exoskeleton that augments human stability during challenging locomotion tasks.
Lab members:
Jennifer Leestma
Collaborators:
Pawel Golyski
Dr. Greg Sawicki