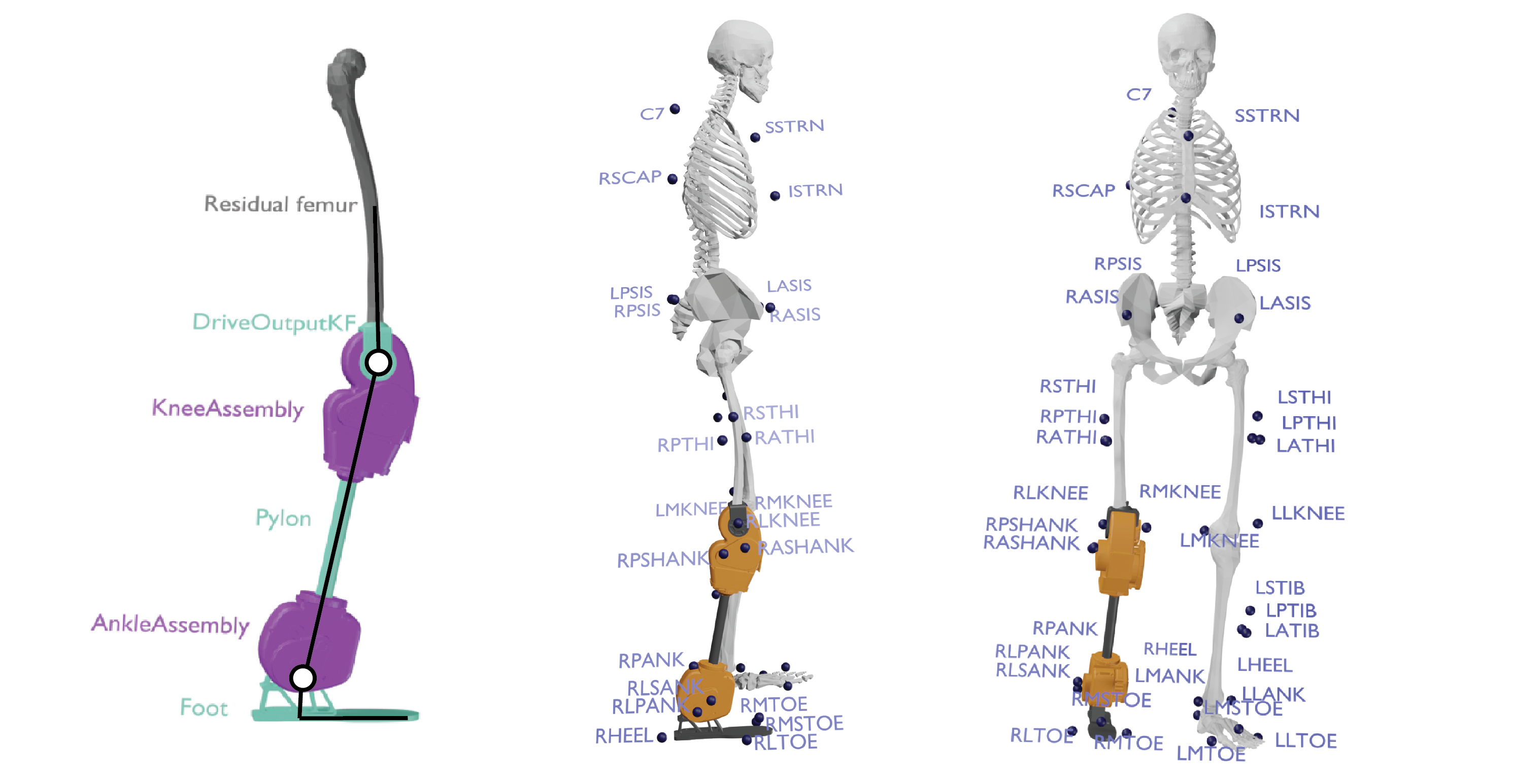
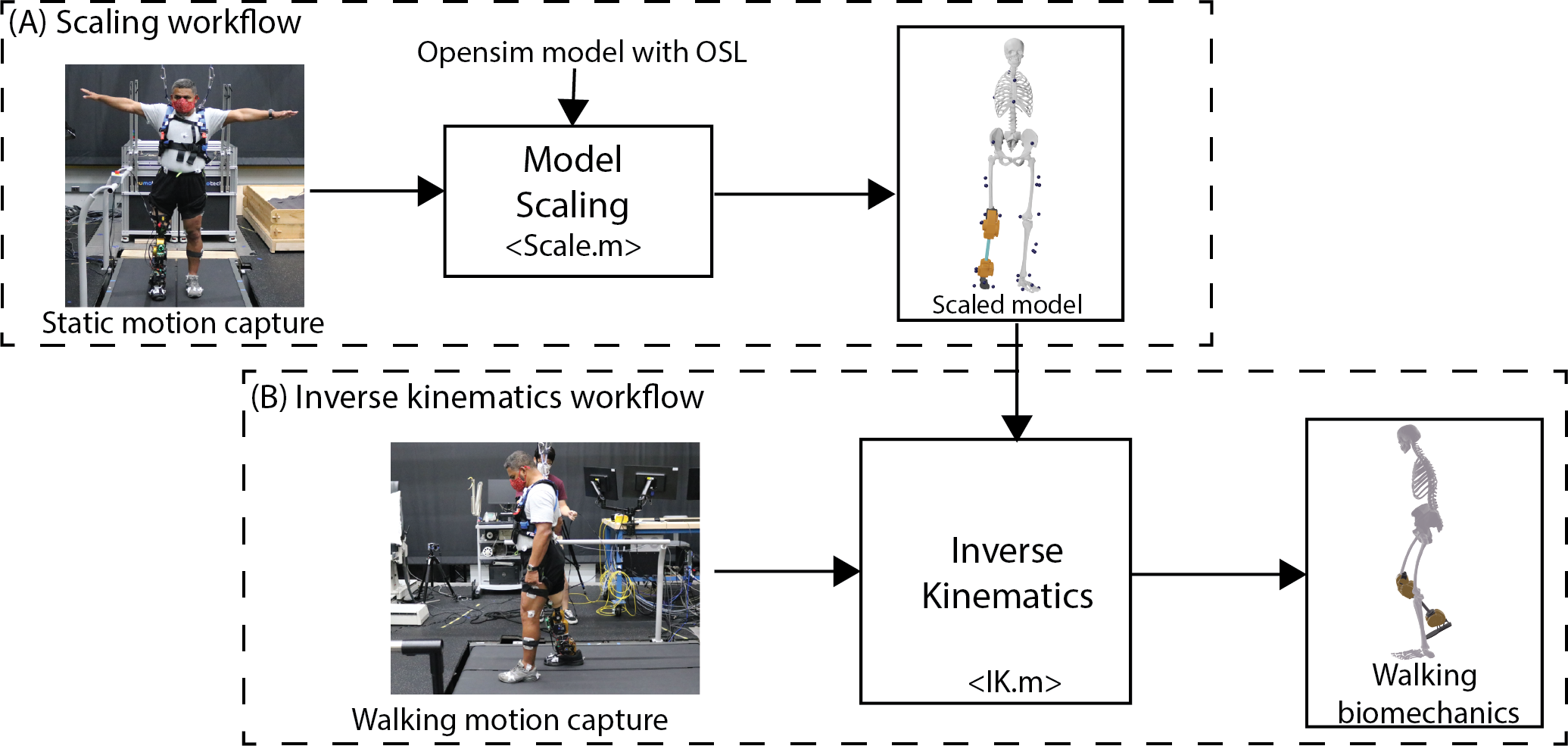
At the 2022 International Symposium on Medical Robotics we are presenting the use and validation of bilateral OpenSim models for prosthetic biomechanical analysis. These models allow the calculation of inverse kinematics of a user with a robotic prosthetic device on optical motion capture data. The model can adjust to different pylon heights, incorporate mass & inertial properties, and provide 3D visualizations of the prosthetic leg. Validation results show that the models can achieve a RMSE of 2.34 deg for the knee and a RMSE of 2.54 deg for the ankle when compared to onboard joint encoders.
Download OpenSim models for right TFA and left TFA wearing the OSL. This folder includes: