Wearable robots for injury prevention in manual labor tasks
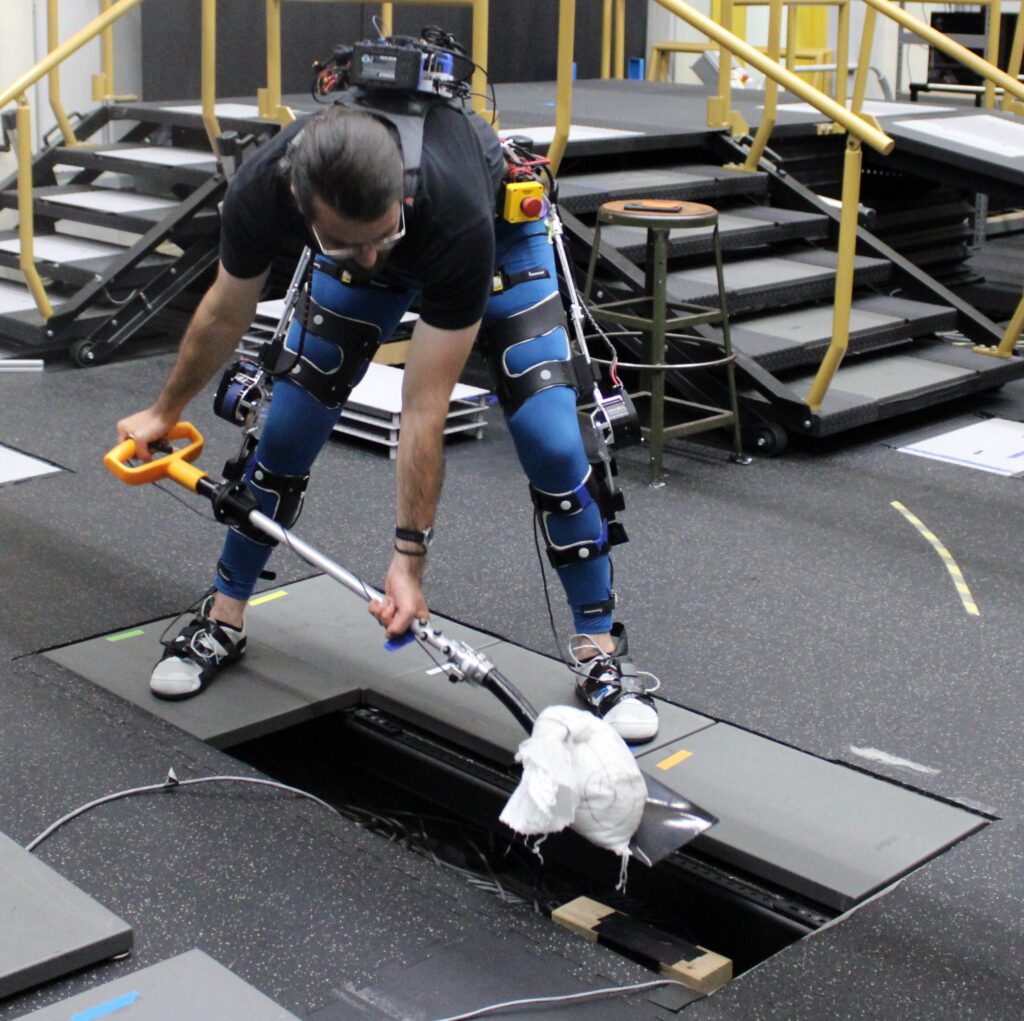
Many workers in hazardous environments and other worksites must regularly perform physically exhausting tasks while wearing heavy protective gear, overexertion from which can sometimes result in debilitating physical injuries. To help increase worker performance and reduce strain on potentially injury-prone joints, we are investigating how to leverage knee and lower back exoskeletons to provide targeted assistance during a variety of manual materials handling tasks. To measure the effect of each of these exoskeletons on the wearer, we are collecting metabolic, EMG, and motion capture data across a battery of intensive physical activities similar to those these workers would face in industrial settings. The results of this work will help us to determine which exoskeletons are most useful for these kinds of tasks right now, and will further inform our development of more intuitive and effective exoskeleton design and control strategies down the road.
Lab members:
Christoph Nuesslein
Ryan Casey
Chase Sun
Allen Liu
Collaborators:
Dr. Greg Sawicki
Dr. Anirban Mazumdar
Sandia National Labs
IHMC Robotics