
We are excited to announce a new publication by our alumni and lab member Keaton Scherpereel, with Carlos Carrasquillo in Science Robotics, “Deep domain adaptation eliminates costly data required for task-agnostic wearable robotic control.”
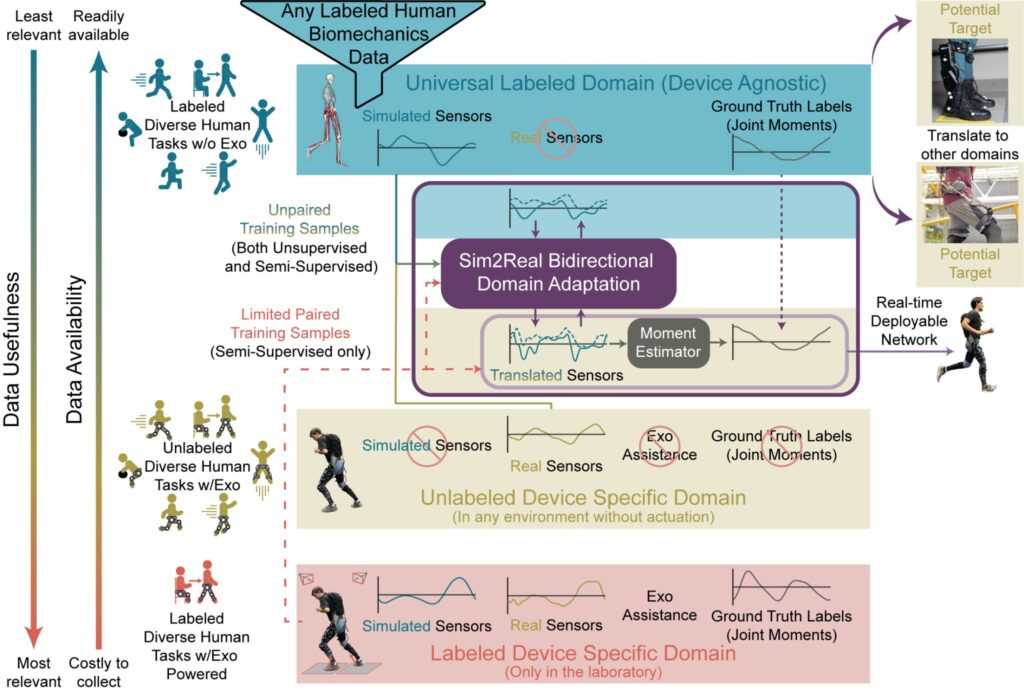
This work enables exoskeletons to estimate joint moments in real time without device-specific datasets, using deep learning to generalize across users and tasks. By applying deep domain adaptation, the team translated existing biomechanics datasets to new devices, eliminating the need for extensive data collection. Models deployed on a hip–knee exoskeleton (N=8) reduced metabolic cost by 9.5–14.6% across tasks, closely matching offline performance.
This approach supports scalable, data-efficient, user-adaptive wearable robotic systems.
