
EPIC Lab Featured by ASME
We’re excited to share that the EPIC Lab has been featured by the American Society of Mechanical Engineers for our work on AI-powered wearable exoskeletons.…

Georgia Tech Highlights Nathaniel Wallace and Prosthesis Team
We’re proud to highlight a recent feature on our VIP researcher Nathaniel Wallace in 11Alive: “Georgia Tech student takes advantage of their disability to give…
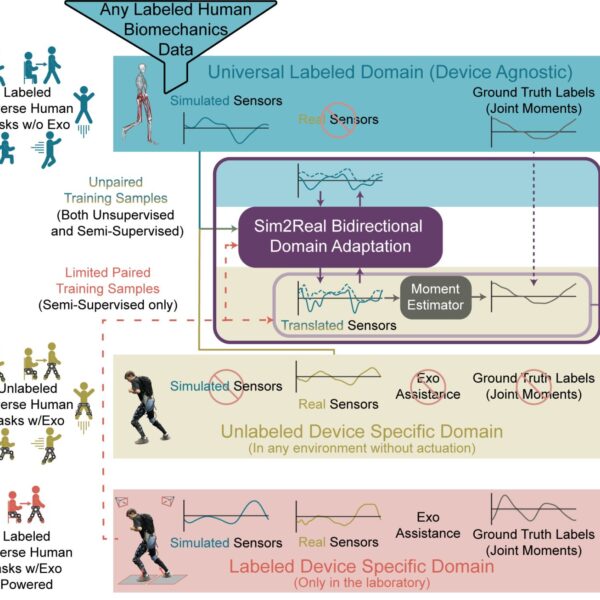
Keaton and Carlos Published a New Paper in Science Roboitcs
We are excited to announce a new publication by our alumni and lab member Keaton Scherpereel, with Carlos Carrasquillo in Science Robotics, “Deep domain adaptation eliminates costly…
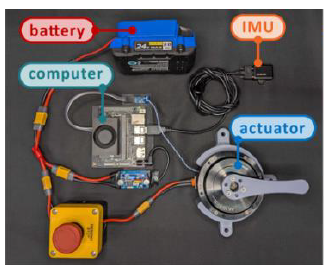
New Open-Source Software: Epically Powerful
We’re excited to announce the release of Epically Powerful (EP) — a modular mechatronics infrastructure and open-source software package for wearable and general robotic systems.…

case Featured in Georgia Tech “Research for Real Life”
We’re excited to share that the EPIC Lab is featured in a Research for Real Life story from Georgia Institute of Technology, highlighting Case Neel’s…